Requirements:
1. Machining of seats for rotor packages on cast blanks, 6 different blanks
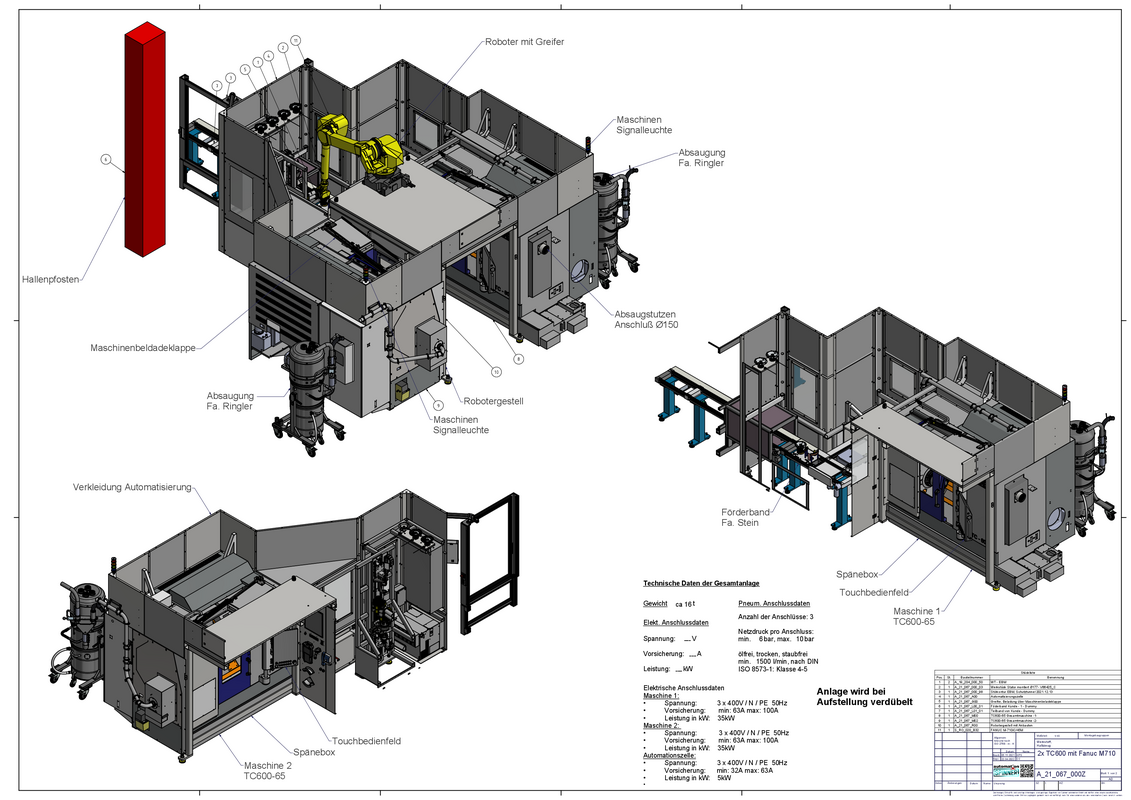
2. Machining of bearing seats on the inside after pressing on the rotor package
3. Integration of the process steps into a fully automated production line
4. Integration of conveyor technology with coded goods carriers
5. Setting up a kanban system for finished parts after initial machining
6. Automation of 2 lathes each with a central robot
Considerations:
The main focus in the design of the systems was on connecting the systems to the rest of the production line, including the planned conveyor system with coded goods carriers, as well as maintaining the overall production cycle, which was only conceivable with 2 machines per process step.
Solution:
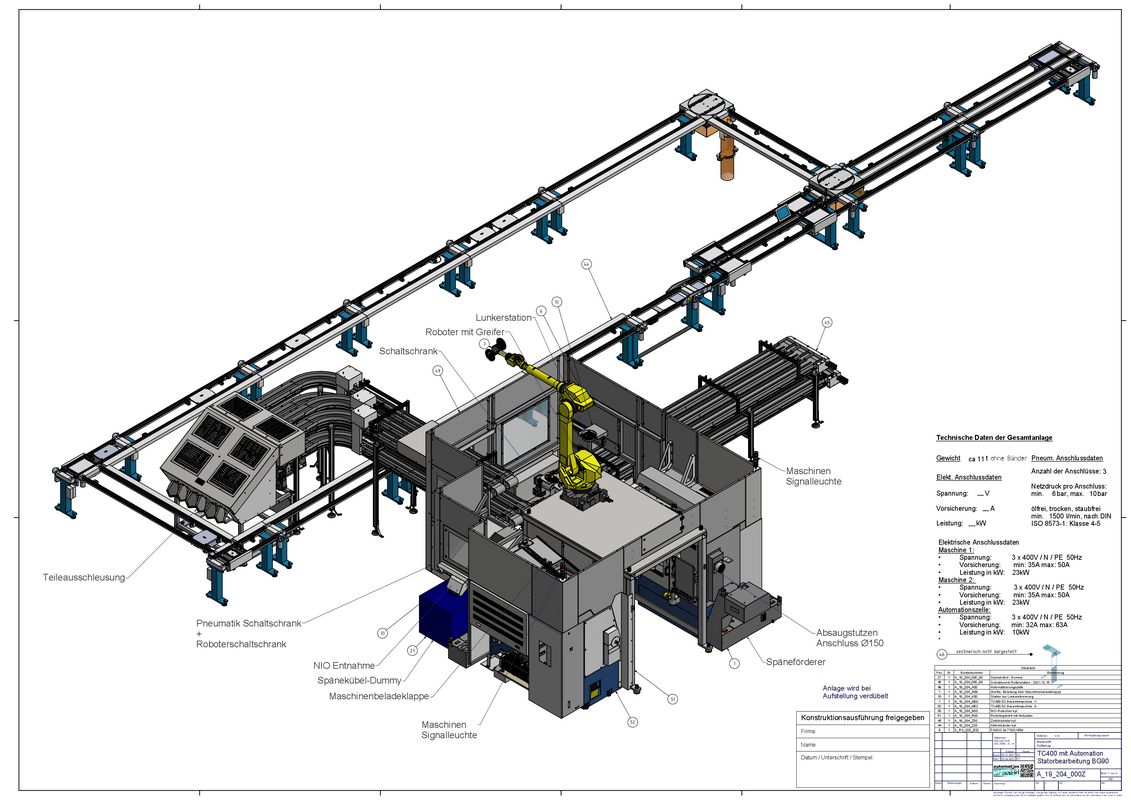
The first step, machining the seat of the rotor package that will later be pressed on, is controlled by a kanban system. When the required finished part for this process step is removed, the need for post-production of a component is recorded by the automation system and scheduled accordingly. The blanks are transported to the system via a conveyor belt with 6 lanes and removed via 6 lanes.
Processing takes place in two TC400 machines, which are automated with a central robot. Two machines are required to maintain the cycle time of the entire line. Tool wear and machine heat build-up are monitored cyclically in the machine using a sensor.
After the rotor package has been pressed onto the blank from the first process step, the internal bearing seats are manufactured in relation to the rotor package. The correct component data and the appropriate machining program are selected in the machine by reading the coded product carrier. Machining is carried out by two TC600 machines, which are equipped with chip extraction through the spindles to ensure that the chips are reliably removed from the machine. As in the previous step, automation is carried out by a central robot, which transfers the components to a measuring station after machining, where the diameter, length and roundness of the bearing seats are measured before the good parts are transferred to the remaining manufacturing steps via the product carrier.